BattleBots
Designing and 3D printing a plastic ant-weight battlebot

Overview
Battlebots is a competitive sport where teams or individuals design, build, and operate remote-controlled robots with the goal of incapacitating their opponent's robot. My bot was designed for the plastic ant-weight division, meaning that it had to be made from PLA, PLA+, PET, PETG, or ABS and stay under the 1lb weight limit.
This is my first battlebot, and I learned a lot through hands-on experience. With the design limitations, I utilized my design skills to develop a robot that can put up a good fight!
Goal
My goal for the battlebot project was to craft a competitive robot that fit within the plastic ant-weight division rules. I wanted to create a robot that was both tough and nimble, capable of taking on any opponent.
Concept and Design
I love the concept of a full-body spinner battlebot. Some famous robots, like Son of Whyachi, Gigabyte, and Captain Shrederator from the BattleBots TV show, served as inspiration for my robot.
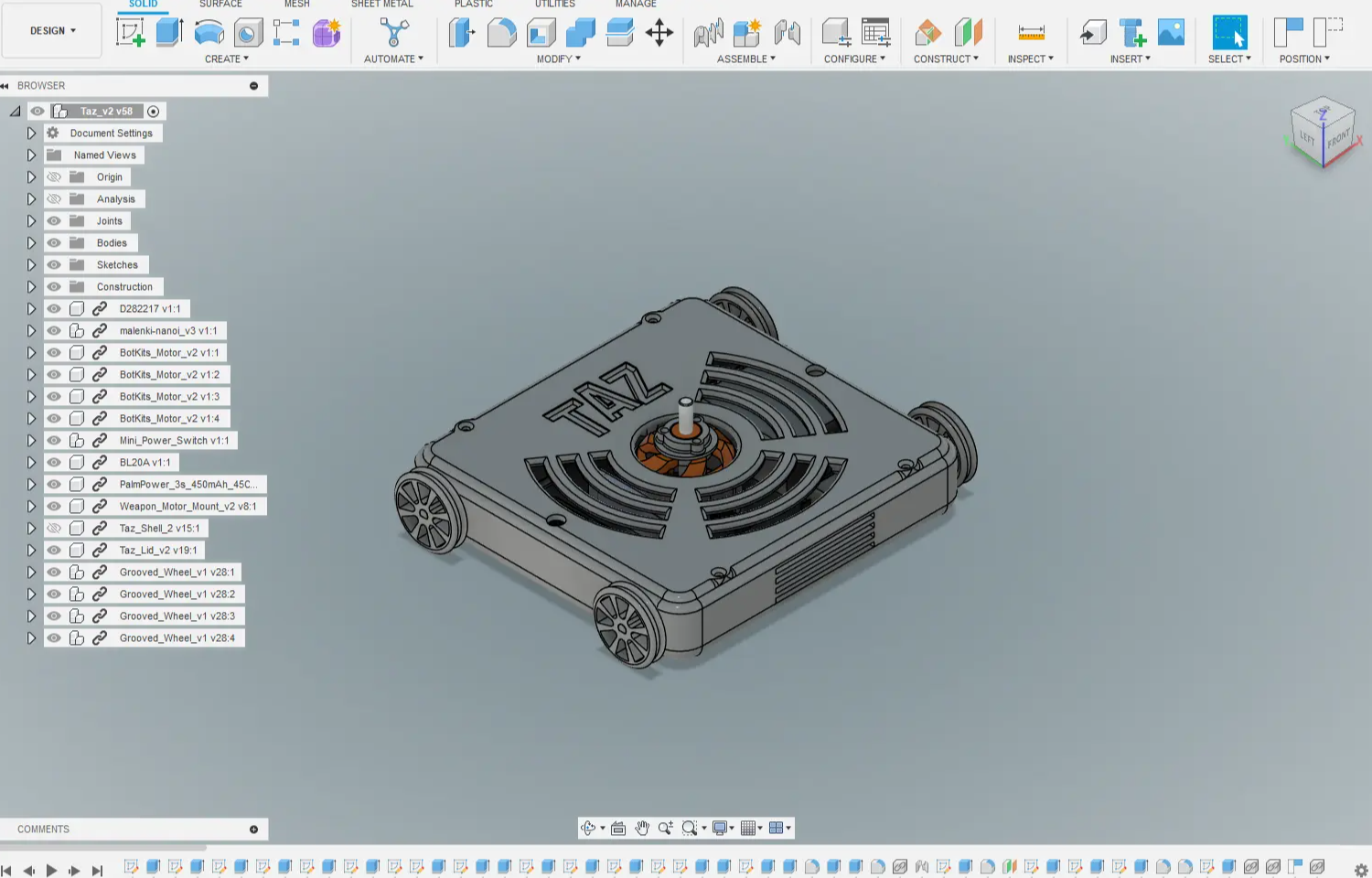
All of my CAD work was done in Autodesk Fusion 360. This included designing my motor adapter, the main chassis, the custom wheels, and the shell (the weapon).
While I experimented with other spinners, the design I ultimately chose was the strongest that fit within the rules. The idea for the weapon is that by spinning the shell counterclockwise, the parallel teeth will deliver solid blows to any bots that get in the way. Whether it's breaking the other bot's chassis or throwing it across the arena, this weapon not only excels in offense but also serves as a great defensive piece.
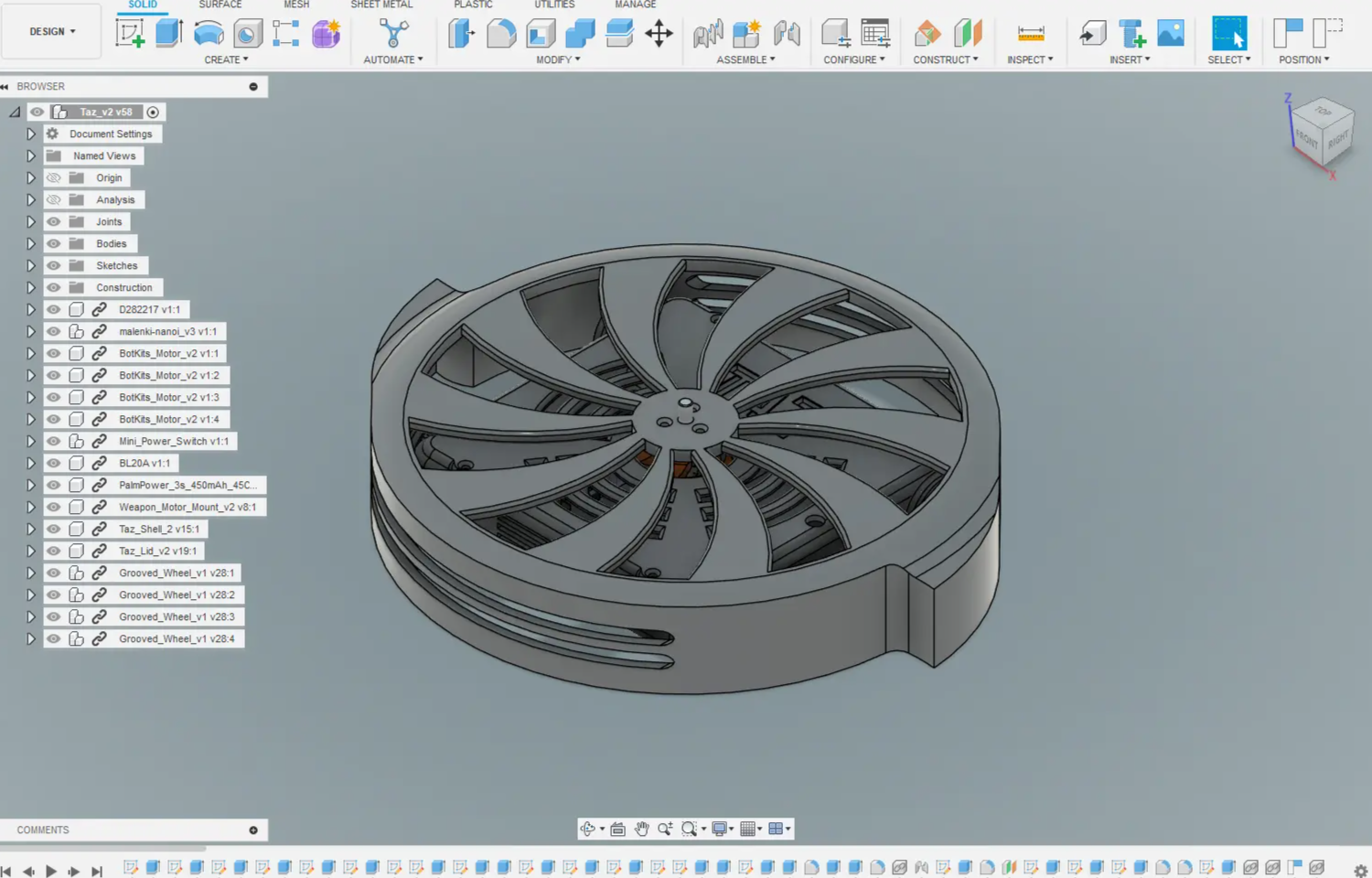
CAD Models
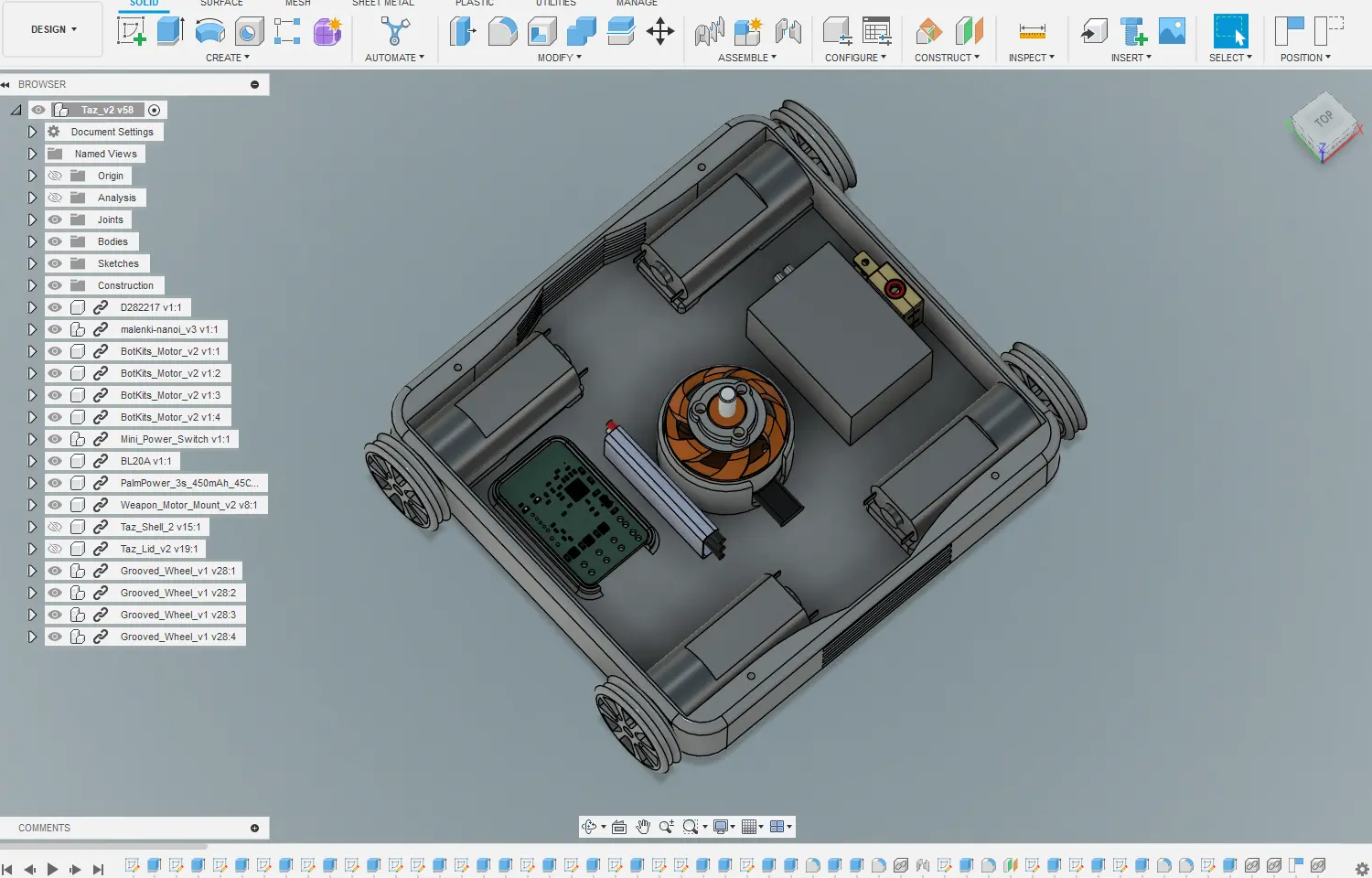

To plan around the 1-pound weight restriction, I used an Excel sheet to track the weight of all components, down to the hardware. A battlebot involves many components, especially when you start working on the electronics. Fortunately, I have friends who have been doing Battlebots for many years. Where I am less knowledgeable about choosing the right electronics, they were able to walk me through what I would need for my vision.
Prototyping
I knew going into this project that I would focus on using PLA plastic since it weighs less, and my printer is not set up for other types of plastic. However, to improve the quality slightly, I used PLA+, which has additional additives to make the plastic more durable.
Some of my first prints focused on the weapon since it was the largest and most important print to get right. While I had to deal with some hiccups during the printing process, I was able to get a successful print of my weapon.
In the early stages, I felt hesitant about my primary weapon design, so I decided to make an orange triangular alternative that focused on offense over defense. I ultimately decided against it since the design was weak in the center, and I couldn't strengthen it without going overweight.

First Spinner

3D Printer Failure

Printing the Spinner
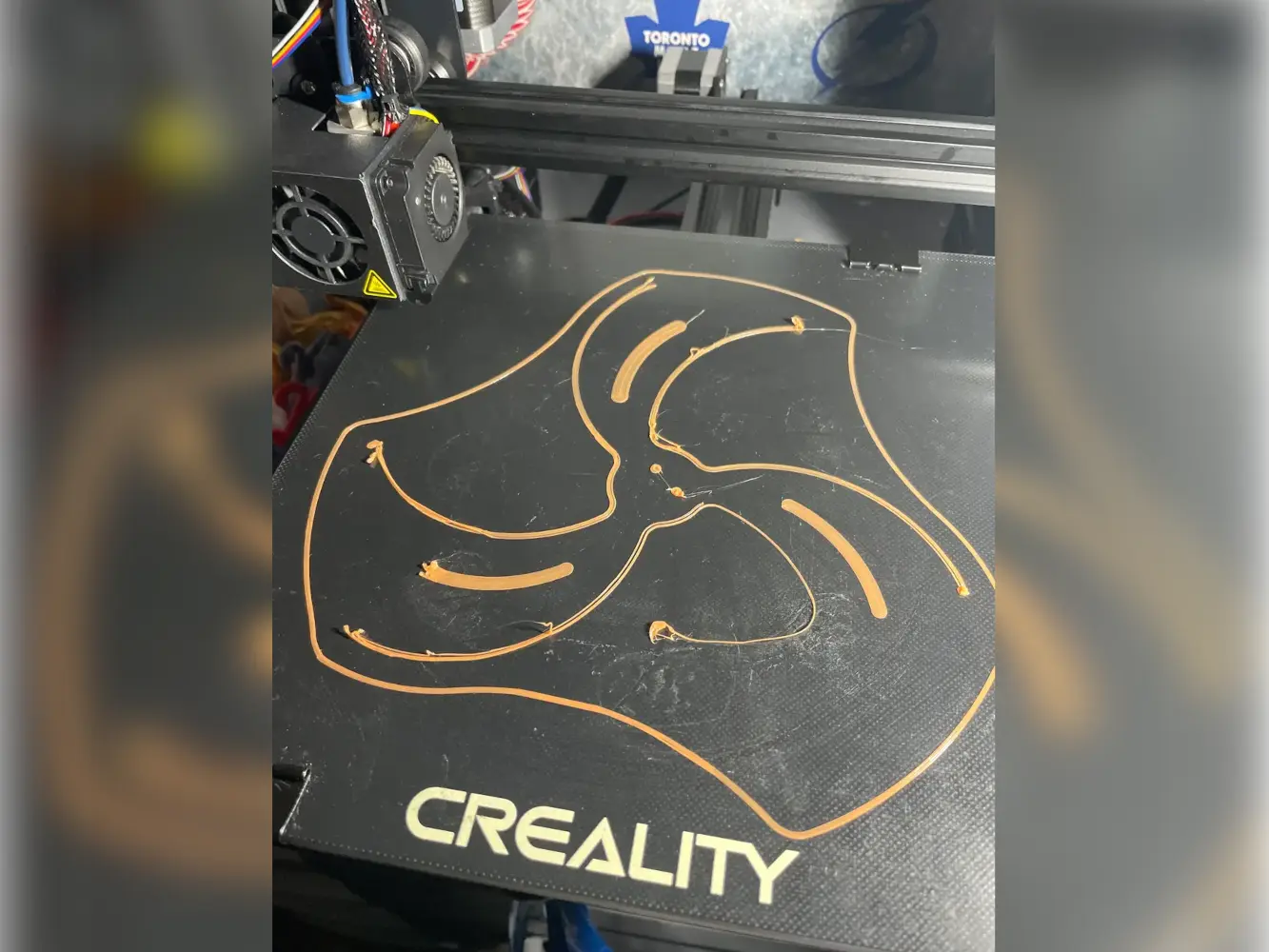
Printing the Alternate Spinner

My Unused Alternative
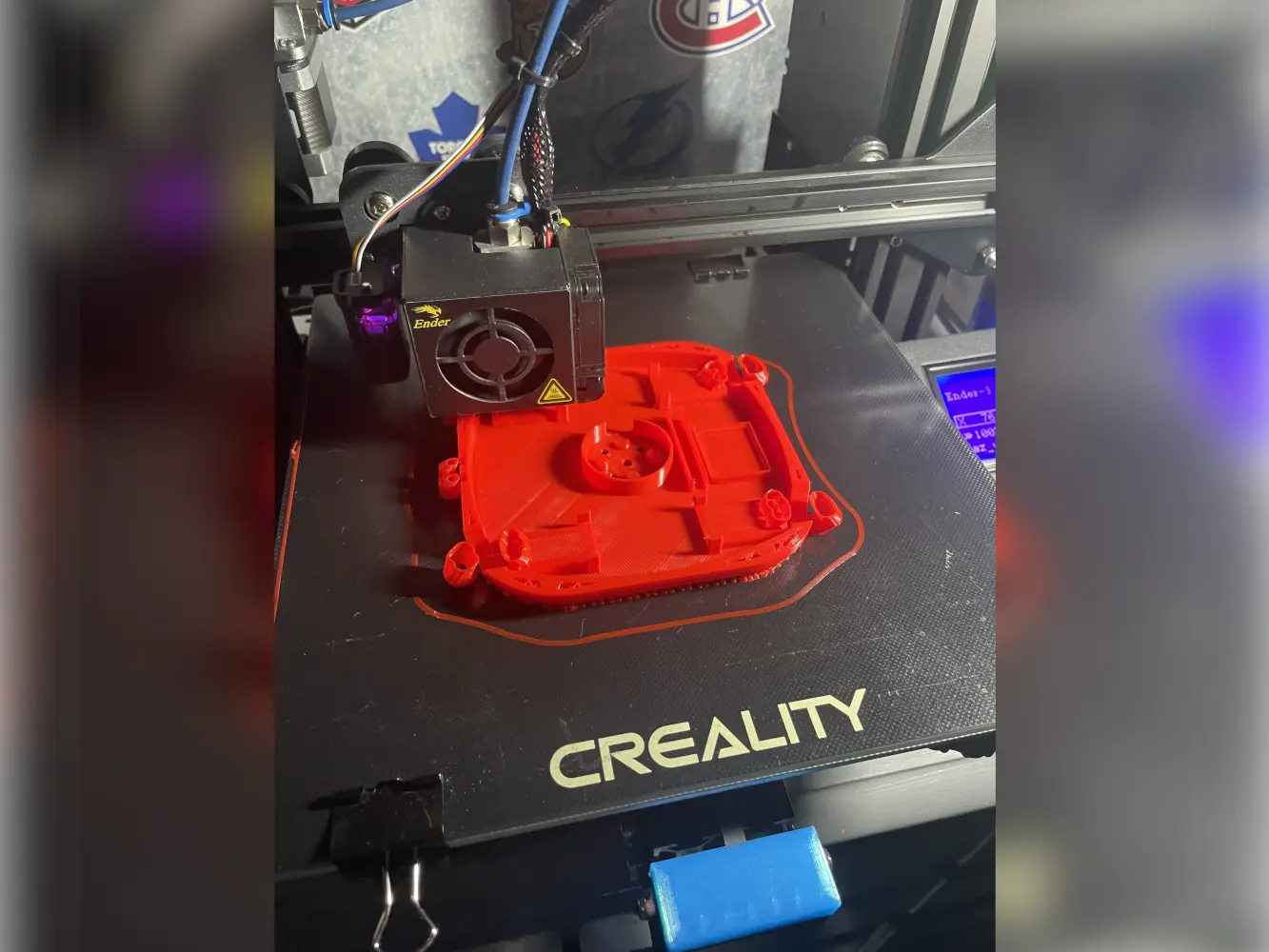
First Chassis Print

Weapon to Motor Adapter

First Wheel Prototype
In addition to the spinner, I printed the chassis, an adapter for the shell to mount onto the motor, and custom-designed my own wheels for the robot. The base of the wheels is printed in PLA+, but the friction aspect of the design comes from rubber o-rings that I fit on the outside edge.
I learned a lot during this process, including how to balance tolerances with the plastic to get the right fit, understanding more about my printer and its quirks, and most importantly, realizing that problems will arise, but as long as I kept my mind focused, I could overcome any obstacle.
After many prints, I made all necessary improvements and moved on to fitting motors into the chassis to ensure that the robot could move onto the electronics stage. But first, I had to give the weapon a spin!
The First Manual Spin!
Electronics and Testing
In the development of my battlebot, I carefully selected the electronics to balance power and weight, ensuring the robot stayed under the competition's weight limit. The Malenki Nano micro-control board is a key component, enabling communication between my controller and the robot to move both the weapon and drive the robot.
To power the movement, I used four DC motors, each mounted securely within the custom-made chassis. These motors drive the custom-designed wheels, providing the necessary traction and maneuverability. Along with the main drive motors, additional electronics such as the weapon motor and control boards were integrated to complete the system.
After assembling the components, I conducted a series of tests to validate the design and ensure all systems functioned correctly. The highlight of this phase was powering up the robot for the first time with all electronics wired up. The following gif captures this moment, showing the robot's initial spin-up, a crucial milestone for this project!
Micro-Control Board

4 DC Motors and Wheels
Fully Wired Up!

Final Build
The final build of my battlebot, named TAZ after the Looney Tunes character, brought together all the design and prototyping work into a cohesive, functional robot. The robot was printed in brown PLA+ to mimic TAZ's distinctive color scheme. This choice not only gave the robot a unique aesthetic but also ensured durability and strength in battle.
The completed robot is a culmination of hardwork, attention to detail, and iterative improvements. The fluid motion of the weapon is satisfying as a designer since it demonstrates that my design is balanced.
To further enhance the visual appeal, the robot was painted, adding style elements that make TAZ stand out in the arena. The custom paint job not only adds a personal touch but also pays homage to the character that inspired the design.

Before Paint

Painted!
Complete Bot!

As a fun side project, a fidget spinner modeled after my robot was also created. This smaller, handheld version captures the essence of TAZ's design and serves as a reminder of the creative process and engineering challenges overcome during this project.
Reflecting on this project, building TAZ was an incredibly rewarding experience. From concept and design to prototyping and final assembly, each step taught me valuable lessons about engineering, design, and the iterative process. The final product not only meets the competition's requirements but also embodies the creativity and technical skill I've developed throughout this journey.
In conclusion, TAZ is more than just a battlebot; it is a testament to the power of innovation, perseverance, and the joy of bringing a unique vision to life. This project has sparked a deeper passion for robotics and design, and I look forward to applying these skills to future challenges. Thank you for following along with my journey, and I hope you enjoyed seeing TAZ come to life as much as I did creating it.
Let's Connect
I'm quick to respond, get in touch for opportunities or to say hi!